Intel在Github上开源了支持所有RealSense系列相机的SDK,包括了D400、SR300系列深度相机和T265双目跟踪相机,支持Linux、Windows、Mac OS以及Android,链接:https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md#installing-the-packages
以下是在基于Intel CPU的Ubuntu 16.04中利用apt-get安装驱动包、快速配置RealSense ROS的步骤:
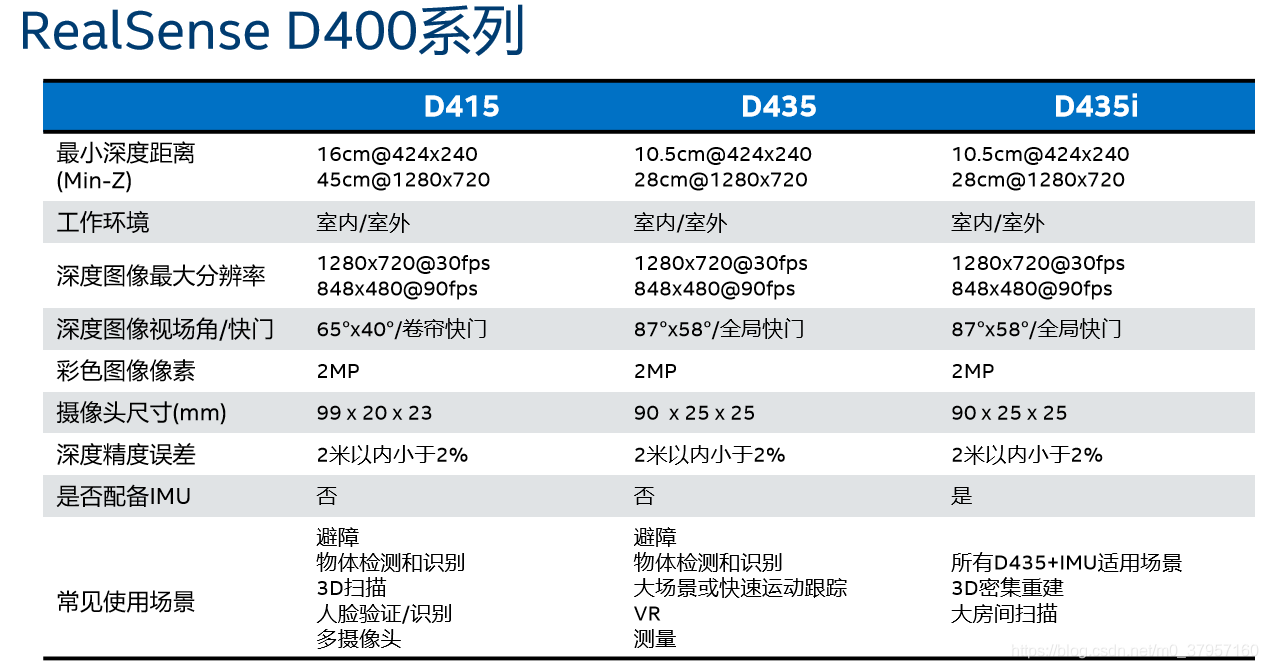
(1)D435I深度相机展示:

(2)如何配置开发环境。
本人是在Ubuntu16.04下ROS环境下使用。
1.安装。
1.1 Register the server's public key :(注册公钥:)
sudo apt-key adv --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE
1.2 加入更新源列表 :(添加包仓库列表:)
(Ubuntu 16 LTS:)
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u或者(Ubuntu 18 LTS:)
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic main" -u2 更新
sudo rm -f /etc/apt/sources.list.d/realsense-public.listsudo apt-get update
2.1 安装驱动和演示程序:
sudo apt-get install librealsense2-dkmssudo apt-get install librealsense2-utils


重新链接深度相机并执行命令验证驱动是否安装成功: realsense-viewer.
2.2 利用深度相机开发需要的包:
sudo apt-get install librealsense2-devsudo apt-get install librealsense2-dbg安装了librealsense2-dev,我们可以使用g++ -std=c++11 filename.cpp -lrealsense2或者IDE编译使用librealsense库的应用。

至此,驱动包安装完成,使用以下命令可以打开RealSense的预览插件,连接相机即可查看设备输出。
查看命令:
realsense-viewer

目前只是在Ubuntu下加载成功并显示。之后还需要在ROS下根据控制节点来采集数据。