目录
1、电路结构
2、计算RTD电阻
3、电流源和线路电阻失配的影响
4、最小化误差
电阻温度检测器(RTD)可在很多工业应用中监控温度。在一个分布式控制系统(DCS)或可编程逻辑控制器(PLC)中,一个数据采集模块可用来监控很多安装在远处的RTD温度。在高性能应用中,若每个RTD都自带激励电路和ADC,则具有最佳的精度,但数据采集模块将会体积庞大、成本高昂,且功耗高。
多路复用模块具有体积较小、成本和功耗较低的特性,但可能会损失一定精度性能。本文讨论如何最小化多路复用系统误差。
1、电路结构
RTD电阻有双线式、三线式和四线式,其中,双线式配置的器件成本最低,四线式器件精度最佳。三线式RTD通常用于工业应用中,可采用两个相同的电流源激励,以消除引脚电阻。与精密参考电阻一同使用时,电流源误差不影响测量精度。高性能ADC(如AD7792和AD7793)集成激励电流源,适合高精度RTD测量。
图1显示片内电流源激励两个三线式RTD。RTD通道可由多路复用器选择,如ADG5433高压、防闩锁、三路SPDT开关。

一次只能测量一个RTD。S1A、S1B和S1C闭合测量RTD #1;S2A、S2B和S3B闭合测量RTD #2。单个ADG5433可切换两个三线式RTD;可增加额外的多路复用器处理两个以上的传感器。RLXX表示RTD和测量系统之间由于导线过长引入的电阻以及开关的导通电阻。
2、计算RTD电阻
由于S1A、S1B和S1C闭环测量RTD #1,RTD电阻可计算如下:

因此,测量值仅取决于RREF的数值(和精度)。但请记住,我们假定IOUT1 = IOUT2,并且RL1A = RL1B = RL1C。事实上,这些电流和电阻失配是测量误差的主要来源。
3、电流源和线路电阻失配的影响
下一步,假定两个电流源失配,比如IOUT2 = (1 + x) IOUT1。现在,考虑下列情况:

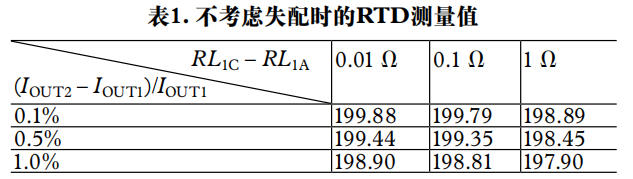
请注意,失配会导致失调误差以及增益误差。失调误差与两个引脚电阻之间的失配有关,而增益误差与两个电流源之间的失配有关。如果不考虑这些失配情况,则根据ADC的数据读数计算的RTD电阻值将是不准确的。
以200 Ω RTD为例,表1显示不考虑失配时,得到的数值;其中,RREF = 1000 Ω,IOUT1 = 1 mA,IOUT2 > IOUT1(以百分比显示),RL1A = 10 Ω,RL1C > RL1A(以电阻值显示)。
4、最小化误差
数据显示很小的失配就会严重影响精度,因此应当使用匹配良好的电流源和开关,以便改进性能。
传递函数是线性的,因此可轻松校准电流源和电阻失配导致的初始误差。然而,失配随温度的变化而改变,这使得补偿变得很不容易。
因此,选用的器件应随温度的变化而具有低漂移特性。若IOUT1 ≠ IOUT2,且电流源如图所示连接:
![]()
假定我们交换IOUT1和IOUT2,使IOUT1连接VIN–和IOUT2,并连接VIN+:
![]()
现在,如果我们对转换结果求和,并且电流源以初始方向连接,同时第二次转换时交换电流源,则可得:

请注意,测量值现已独立于电流源失配。唯一的缺点是速度的损失,因为每次RTD计算都需经过两次转换。
AD7792和AD7793针对该应用设计。如图2所示,通过写入I/O寄存器,集成开关可简化电流源到输出引脚的交换。

在AD7792/AD7793器件内交换激励电流源可改善多路复用RTD测量电路的精度。计算显示了电流源和线路电阻之间失配问题的重要性。
学习总结:ADI官网
资源下载:https://download.csdn.net/download/m0_38106923/19813240