图像的数据结构和文件格式是指数字图像在计算机中存储的组织方式,是计算机算法应用于图像处理的数据基础。
---------------数据结构------------
图像的数据结构是指图像像素灰度值的存储方式,常用方式是将图像各像素灰度值用一维或二维数组相应的各元素加以存储。
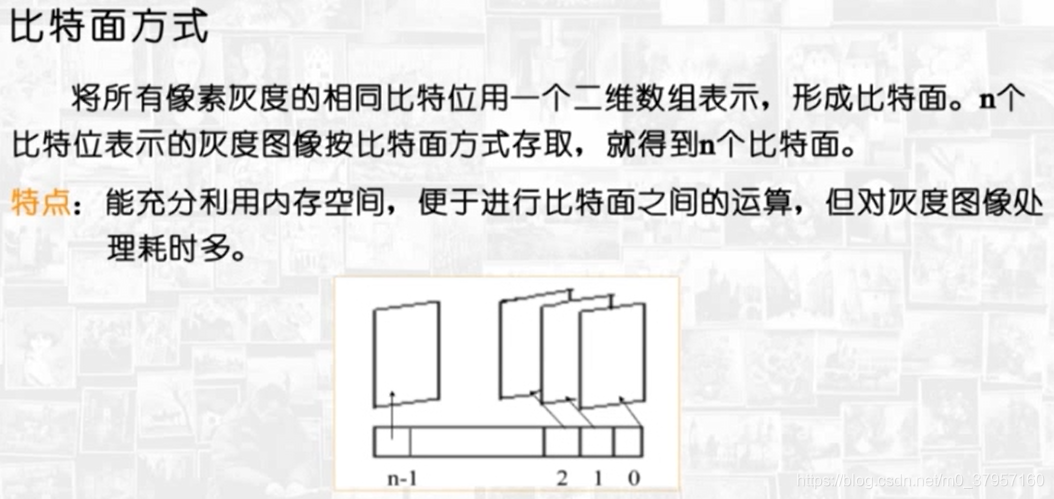
此外还有其他存储方式:1组合方式、2比特面方式、3分层结构、4树结构、5多重图像数据存储

 优点是:先对低分辨率图像进行处理,然后根据需要对高分辨率图像进行处理,可提高效率。
优点是:先对低分辨率图像进行处理,然后根据需要对高分辨率图像进行处理,可提高效率。


-----------图像文件格式----------
按不同的方式进行组织和存储数字图像像素的灰度,就得到不同格式的像素文件。图像文件按其格式的不同具有相应的扩展名,常见的图像文件格式按扩展名可以分为:RAW格式、BMP格式、TGA格式、PCX格式、GIF格式、TIFF格式等。
这些图像格式都大致包含下列特征:
1.描述图像的高度、宽度以及各种物理特征的数据。
2.彩色定义。
3.描述图像的位图数据体
例如RAW格式:它是将像素按照行列号顺序存储在文件中。这种文件只含有图象像素数据,不含有信息头,因此,在读图像时需要事先知道图像大小(矩阵大小)。它是最简单的一种图像文件格式。但通常使用RAW格式需要一个额外的信息文件。
BMP格式:(BMP文件由以下四部分组成:)
1)14字节的头文件。 2)40字节的信息头。 3)8字节的颜色定义。 4)位图数据。





GIF格式数据:GIF图象是基于颜色列表的,最多支持8位。GIF支持在一幅GIF文件中存放多幅彩色图像,并且可以按照一定的顺序和时间间隔将多幅图像依次读出并显示在屏幕上,这样就可以形成一种简单的动画效果。
GIF一般由7个数据区组成,1)头文件、2)通用调色板、3)位图数据区、4)以及四个扩充区
GIF图象广泛的应用于网络中的动态图像表示。
TIFF格式:TIF数据文件主要由三部分组成:1)文件头、2)标识信息区、3)图像数据区
TIFF文件有其特有的标识信息,并能进行自定义,是一种开放易于扩展的数据格式,能支持较大数据量和不同定义方式的影像数据,广泛用于遥感、地理信息领域。
---------图像的特征------
图像的特征是对图象内容的一种数学统计描述,是数字图像信息提取的一种重要描述方法和研究内容;图像噪声是数字图像在数字化中产生的一种干扰信息,通常要对图像噪声进行抑制,提取我们需要的信息。
图像的特征与噪声包含以下类别:1)图像的特征类别 2)特征提取与特征空间 3)图像噪声
----图像的特征类别:



特征提取:获取图像特征信息的操作称为特征提取。它作为模式识别、图像理解或信息量压缩的基础是很重要的。通过特征提取可以获得特征构成的图象(称作特征图像)和特征参数。

----图像噪声
1.噪声的种类:1)外部噪声:如天体放电干扰,电磁波从电源线窜入系统等产生的噪声。
2)内部噪声:系统内部产生,主要包括四种,由光和电的基本性质引起的,机械运动产生的噪声,元器件噪声,系统内部电路噪声。
2.噪声特征:对于灰度图像f(x,y)来说,可看作二维亮度分布,则噪声可看作对亮度的干扰,用n(x,y)来表示。常用统计特征来描述噪声,如均值,方差(交流功率),总功率等。