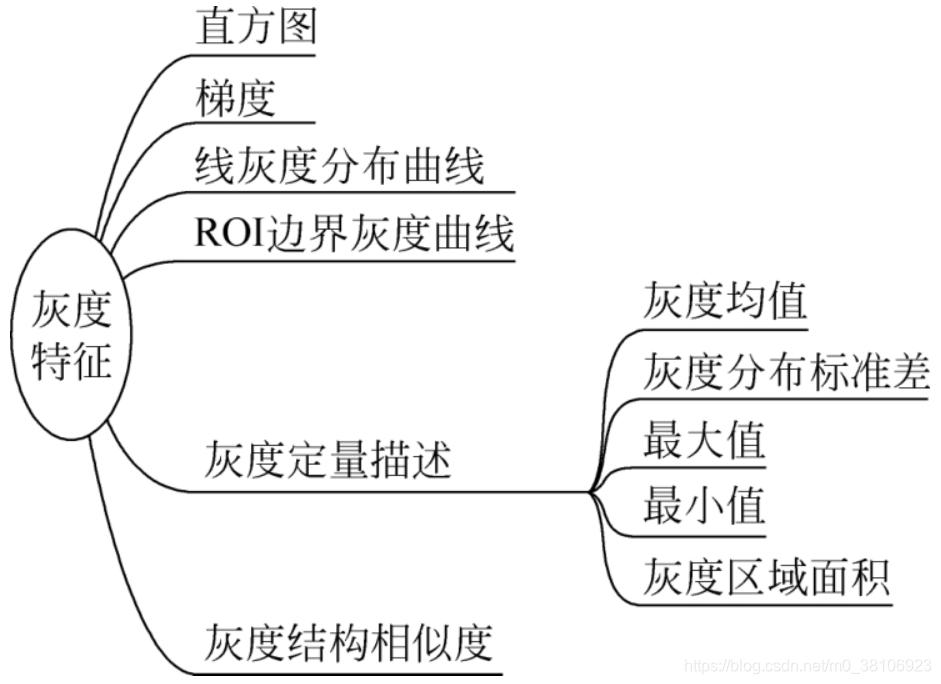
像素灰度是图像最为典型的特征之一,基于图像像素灰度能衍生更多的图像特征,包括图像的直方图、线灰度分布曲线、图像线灰度均值、ROl边界灰度曲线、灰度定量描述以及图像结构相似度等,如下图所示:
拓展学习:LabVIEW图像灰度分析与变换(基础篇—4)_不脱发的程序猿的博客-CSDN博客_labview图像灰度处理
在机器视觉领域,图像灰度特征可用于实现目标的存在性检测和基于灰度的模式匹配。在进行目标的存在性检测时,机器视觉系统会不断计算并监测指定ROI范围内的图像灰度量化指标是否在设定的范围内,若指标超限,则认为所检测的目标不存在。基于灰度的模式匹配,可以计算图像中的灰度或梯度,并从中寻找可与模板图像匹配的特征。
在牙线生产过程中,常会出现牙线未安装或牙线断裂的情况。为了能剔除此类次品,可监测安装牙线区域的图像灰度均值及标准差。若灰度均值和表征像素灰度分布的标准差超出指定的范围,就说明被检测的产品存在质量问题。
通过一个基于图像灰度特征进行牙线检测的实例程序,了解其使用方法。
该实例使用了字符串状态机结构,包括程序初始化、基于标准样本设置ROI、更新测量坐标系、产品检测等步骤。由于被测单元(UnitUnder Test,UUT)可能在视场内移动或旋转,因此需要使监测牙线的ROl能相对于产品上的某一固定特征自动移动。
为此可使用以下几个标准过程:
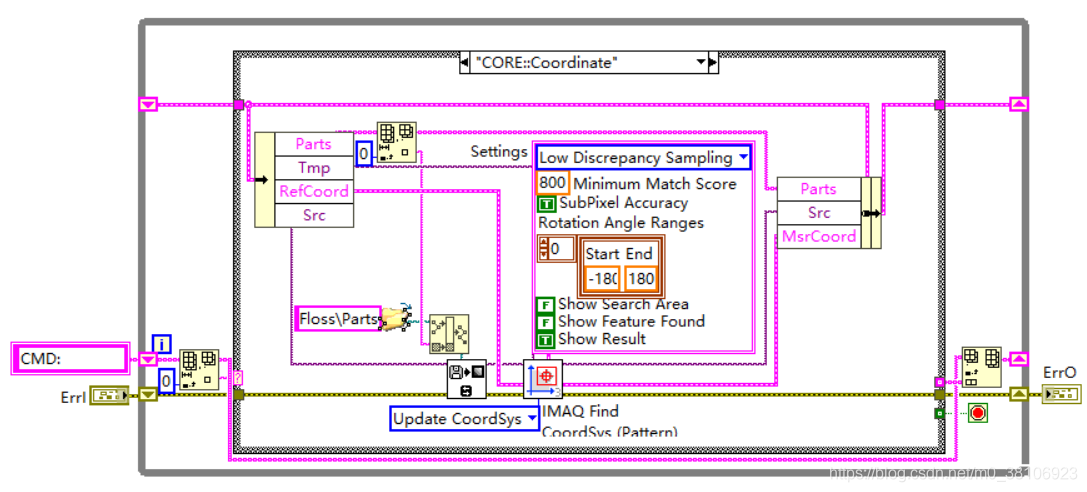
- 根据标准图像中目标的特征,确定参考坐标系;
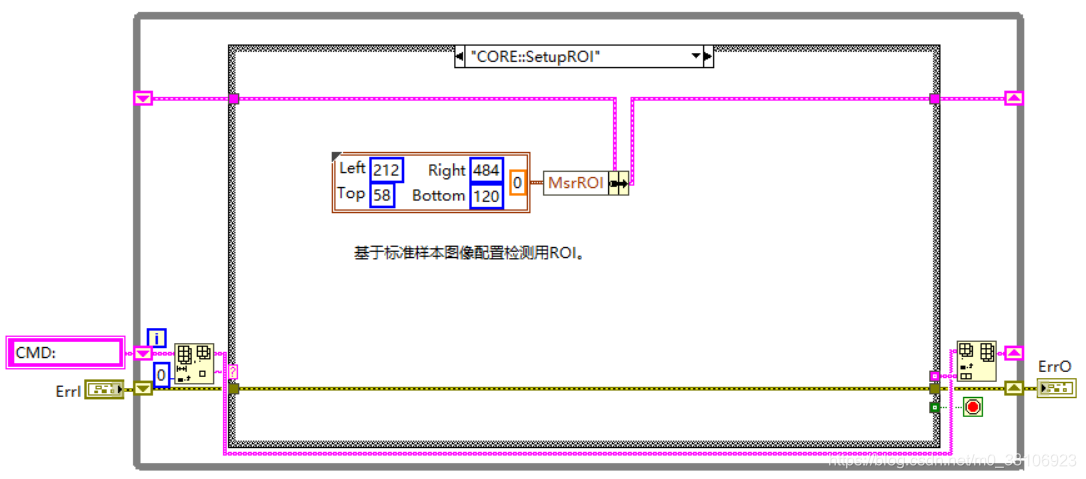
- 在标准图像中设置用于检测牙线的ROl;
- 根据目标的特征,在新采集的图像中重新搜索并更新测量坐标系;
- 参照测量坐标系和参考坐标系之间的平移和旋转关系,对用于检测的ROl做同样变换,以保证其仍能准确圈定特征区域;
- 基于ROI进行测量和决策。
程序初始化分支中的代码先读取标准样本图像FIs00.png和特征模板图像template.png到内存中。其中特征模板为产品的底座部分。此后,程序调用工作在搜索参考坐标系模式下的IMAQ FindCoordSys (Pattern)3,在标准样本图像中搜索与特征模板匹配的部分,以设置标准图像的参考坐标系。CORE: :SetupROI分支中的代码基于标准图像设置了测量ROI的位置。程序设计如下所示:


程序效果如下所示:
项目下载请参见:LabVIEW牙线产品合格检测-嵌入式文档类资源-CSDN下载
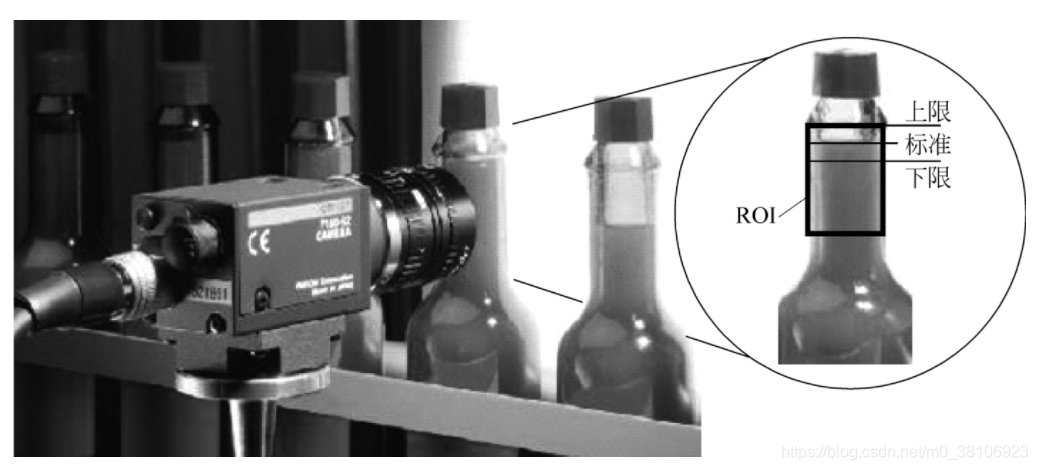
灰度检测的另一个典型应用场合是灌装检测。例如,在下图所示的生产线上,相机要逐个检查产品所灌装的液位是否达标。此时就可以根据瓶颈处矩形ROI区域内的平均灰度是否在灌装要求的范围内来检测产品的质量。而灌装液位的上下限可以分别由液位到达上限或下限时的图像灰度均值来表示。此外,为了降低光线变化对产品系统的影响,通常此类检测在HSL空间上进行。